Китайские инженеры разработали гибридный орнитоптер JT-fly. Он способен летать с помощью четырех машущих крыльев и умеет ходить, используя для этого шесть ног. Также робот может самостоятельно вставать на ноги после падения на спину и взлетать из горизонтального положения. Скорость полета JT-fly достигает пяти метров в секунду, а по поверхности он может передвигаться со скоростью до 30 сантиметров в секунду. На разработку обратило внимание издание IEEE Spectrum, статья опубликована в IEEE Robotics and Automation Letters.
Летательные аппараты с машущими крыльями, повторяющие строение и принципы полета насекомых, демонстрируют высокую аэродинамическую эффективность в малых масштабах. А отсутствие вращающихся пропеллеров, характерных для мультикоптеров, делает махолеты более безопасными для окружающих и снижает уровень шума. Однако, как и другие дроны, орнитоптеры, обладая высокой свободой передвижения, расплачиваются за нее слабой энергоэффективностью, — полет требует высоких затрат энергии.
Инженеры пытаются обойти это ограничение через создание гибридов, которые объединяют в одной конструкции летающих роботов с возможностями более энергоэффективных наземных. Например, инженеры из Нанкинского университета аэронавтики и космонавтики ранее разработали гибридный орнитоптер с небольшими вспомогательными воздушными винтами и гусеничным приводом, благодаря которому дрон способен садиться и передвигаться даже по вертикальным поверхностям, экономя при этом энергию.
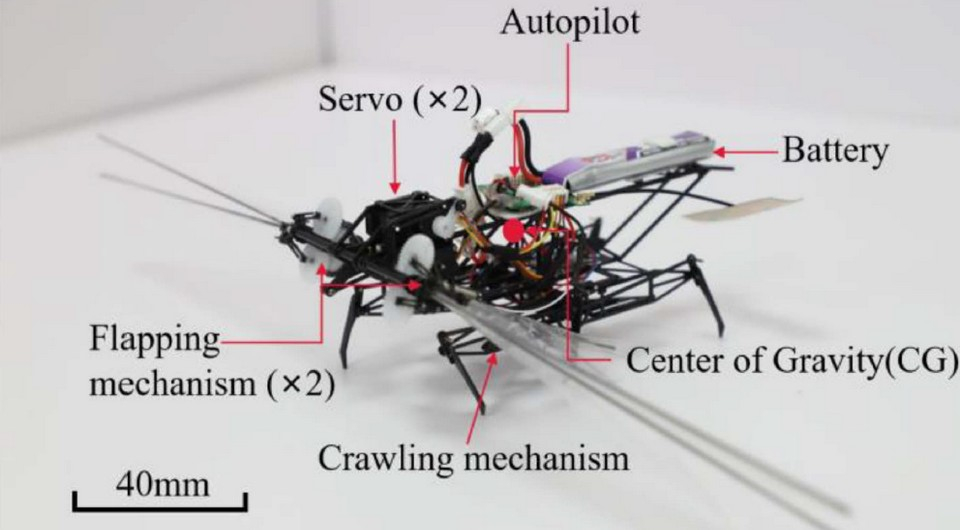
Группа разработчиков под руководством Лю У (Wu Liu) из Шанхайского университета Джао Тонг пошла несколько другим путем и скрестила орнитоптер JT-fly с ходячим шестиногим роботом. У них получился небольшой гибридный робожук массой около 35 грамм с четырьмя крыльями размахом 33 сантиметра. Крылья разделены на два блока, в каждом из которых есть по два крыла, которые машут в противоположных направлениях. Это снижает вибрацию и позволяет использовать эффект от хлопка соударяющихся крыльев для увеличения подъемной силы. Мембрана крыльев изготовлена из тонкой полиэфирной пленки, а передняя кромка — из углеродных стержней. Машущий механизм приводится в движение двумя бесколлекторными электродвигателями через двухступенчатые редукторы.
Управление JT-fly в воздухе по шести степеням свободы производится за счет изменения угла наклона плоскости крыльев и частоты махов. Два сервопривода, установленные в основании каждой пары крыльев, позволяют независимо регулировать их угол наклона по отношению к корпусу. Крен регулируется путем изменения частоты взмахов левой и правой пары крыльев. Если левая пара машет чаще правой, робот наклоняется влево, и наоборот. Управление тангажом происходит за счет одновременного изменения углов наклона плоскости взмахов обеих пар крыльев, а за рысканье отвечает асинхронное изменение угла наклона плоскостей левого и правого блока крыльев в противоположных направлениях. Например, если левая пара наклонена вперед, а правая — назад, робот начинает вращаться влево. Наконец, вертикальное перемещение регулируется общей тягой: чем чаще машут крылья, тем больше создаваемая ими тяга и тем быстрее робот поднимается.
По поверхности робот передвигается за счет шести ног, которые приводятся в движение двумя независимыми электромоторами через редукторы. Управление направлением движения происходит за счет разницы в скорости вращения этих электромоторов, что приводит к различию в частоте шагов левого или правого набора ног.
За управление в JT-fly отвечает плата автопилота с микроконтроллером, инерциальным измерительным блоком (IMU) и барометром. IMU измеряет угловые скорости и ускорения робота, а барометр — высоту. Микроконтроллер обрабатывает данные с датчиков и вырабатывает сигналы управления для сервоприводов, используя алгоритм пропорционально-интегрально-дифференциального регулирования (PID). Оператор может управлять направлением полета робота дистанционно с помощью пульта.
В ходе испытаний JT-fly показал, что может устойчиво летать, маневрировать в воздухе, летая восьмеркой между двумя препятствиями, ходить по поверхности, меняя направление, самостоятельно взлетать из горизонтального положения и совершать посадку, вставая на ноги. Кроме этого, с помощью крыльев робот способен самостоятельно вставать из перевернутого положения. Максимальная скорость полета JT-fly составила пять метров в секунду, а скорость ползания по горизонтальной поверхности — 30 сантиметров в секунду. С литий-ионным аккумулятором емкостью 380 миллиампер-час робот может продержаться в воздухе около восьми минут, а в режиме ползания проработать более 60 минут.
Инженеры немецкой компании Festo, занимающейся разработкой и производством промышленного оборудования, недавно представили другой орнитоптер — BionicBee. Дрон имеет почти такую же массу, как JT-fly — 34 грамм, но, в отличие от последнего, удерживается в воздухе лишь двумя машущими крыльями. Главная же особенность роботизированной пчелы — способность автономно действовать в рое из десяти роботов.
Источник: N+1
Фото: Chaofeng Wu et al. / IEEE Robotics and Automation Letters, 2024












Президент Международного Института Развития Научного Сотрудничества
Российский политолог, историк, публицист.
Доктор политических наук, профессор МГИМО

Генеральный директор Международного Института Развития Научного Сотрудничества

Научный руководитель Международного Института Развития Научного Сотрудничества
Доктор исторических наук.
Профессор

Председатель Попечительского совета Международного Института Развития Научного Сотрудничества
Доктор исторических наук, профессор, член-корреспондент РАН. Директор Института востоковедения РАН. Член научного совета Российского совета по международным делам.

Заместитель Председателя Попечительского совета Международного Института Развития Научного Сотрудничества
Доктор исторических наук.
Профессор кафедры стран постсоветского зарубежья РГГУ, профессор факультета глобальных процессов МГУ им. М.В. Ломоносова.










.jpg
)