Японские инженеры разработали надувного управляемого робота-аватара, который может использоваться для расширения возможностей недорогих систем телеприсутствия. За счет системы тросов и сервомоторов надувной аватар, установленный на роботе телеприсутствия, может выполнять различные жесты, используемые удаленным пользователем для невербальной коммуникации и физического взаимодействия с людьми. Статья опубликована в журнале International Journal of Automation Technology.
К роботам-аватарам сегодня зачастую относят два типа устройств: полноценные аватары в виде удаленно управляемых сложных и дорогих гуманоидных роботов, которые, например, позволяют физически взаимодействовать с окружением с помощью рук, и гораздо более простые и дешевые системы телеприсутствия — как правило, это условный «планшет на колесах», который позволяет человеку имитировать свое физическое присутствие во время видеозвонков: перемещаться по помещению и осматривать окружающую обстановку с помощью встроенной камеры. В перспективе, когда появятся более доступные гуманоидные роботы, различие между этими двумя типами устройств может исчезнуть, однако уже сегодня инженеры пытаются найти недорогие способы для расширения возможности простых систем телеприсутствия.
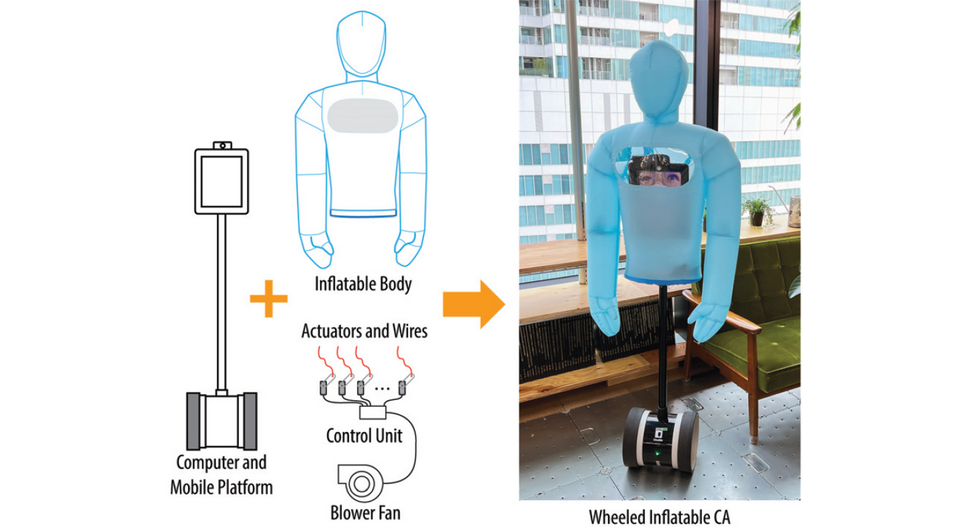
Японские инженеры под руководством Ён А Сон (Young Ah Seong) из Университета Хосей предложили использовать в дополнение к системе телеприсутствия надувного робота, который будет выполнять роль подвижного управляемого физического аватара. В сложенном состоянии он практически не занимает места, а в нужный момент надувается, приобретая форму человеческого торса с подвижными руками и головой, после чего может использоваться для демонстрации жестов во время общения и физического взаимодействия с окружающими людьми.
В качестве базы для прототипа был выбран готовый робот Double 2 от компании Double Robotics. Он представляет собой классический вариант системы телеприсутствия в виде балансирующего на двух колесах цилиндрического основания и длинной штанги, на которой установлена камера для передачи изображения и экран для отображения лица пользователя. Поверх штанги разработчики установили надувной модуль с человекоподобным аватаром, сшитым из нейлоновой ткани. Нагнетание воздуха внутрь происходит с помощью вентилятора. Так как экран и камера системы телеприсутствия оказываются внутри разложенного аватара, на его груди предусмотрено прозрачное окно.
Управление руками и головой происходит с помощью системы из прикрепленных изнутри к нескольким точкам тросов, которые натягиваются с помощью сервоприводов. Робот может поднимать руки, сгибать их в локте, пожимать плечами, наклоняться из стороны в сторону и кивать головой, наклоняя ее на 30 градусов. Эти базовые движения можно использовать для невербальной коммуникации и физического взаимодействия с людьми, например, для рукопожатий или объятий. Кроме этого на поверхности могут быть установлены сенсоры, которые позволят определять место и силу прикосновения к определенной части надувного тела робота.
В качестве эксперимента разработчики использовали робота на одном из симпозиумов, который проходил в гибридном формате, когда часть участников физически присутствовала в аудитории, а другая участвовала удаленно онлайн. Робот перемещался по аудитории, передавая изображение 600 онлайн-участникам.
В дальнейшем инженеры планируют более подробно исследовать возможности надувного корпуса с помощью компьютерного моделирования, поработать над расширением арсенала возможных жестов и возможными сценариями использования робота.
Надувные элементы в роботах позволяют не только сделать их более безопасными при взаимодействии с людьми, но иногда могут выполнять дополнительные полезные функции. Например, надувные тороидальные камеры, установленные вокруг робоманипулятора, созданного инженерами исследовательского подразделения компании Disney, позволяют ему чувствовать прикосновения за счет изменения давления.
Источник: N+1
Фото: Ryuma Niiyama et al. / International Journal of Automation Technology, 2023












Президент Международного Института Развития Научного Сотрудничества
Российский политолог, историк, публицист.
Доктор политических наук, профессор МГИМО

Генеральный директор Международного Института Развития Научного Сотрудничества

Научный руководитель Международного Института Развития Научного Сотрудничества
Доктор исторических наук.
Профессор

Председатель Попечительского совета Международного Института Развития Научного Сотрудничества
Доктор исторических наук, профессор, член-корреспондент РАН. Директор Института востоковедения РАН. Член научного совета Российского совета по международным делам.

Заместитель Председателя Попечительского совета Международного Института Развития Научного Сотрудничества
Доктор исторических наук.
Профессор кафедры стран постсоветского зарубежья РГГУ, профессор факультета глобальных процессов МГУ им. М.В. Ломоносова.










.jpg
)